沈阳自动化所康复外骨骼机器人研究取得进展
近日,中国科学院沈阳自动化研究所科研人员在人机多维度适配与共融交互控制方面取得新进展,面向偏瘫患者下肢康复,设计了一款双侧髋-膝-踝全柔顺驱动康复外骨骼机器人,并提出了一种多层级交互控制方法。
下肢康复外骨骼机器人作为一种神经功能重建技术,是通过“神经可塑性”原理为运动功能障碍患者提供运动康复训练,并实现受损机能重塑。对于偏瘫人群,他们的双侧运动功能呈现差异化,即患侧具有弱运动功能和异常步态模式,而健侧则保留较高程度的运动与感知能力,对康复提出了独特的要求。目前现有的外骨骼机器人研究,多采用刚性驱动关节与单一化控制方法,难以同时提供偏瘫双侧运动中患侧康复矫正与健侧柔顺交互,限制了该人群通过外骨骼辅助康复的有效性。
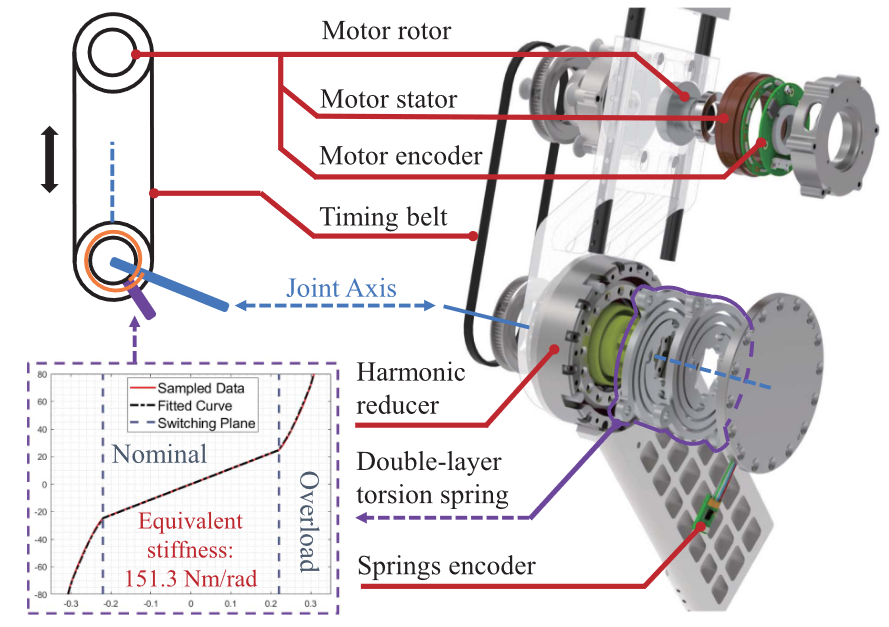
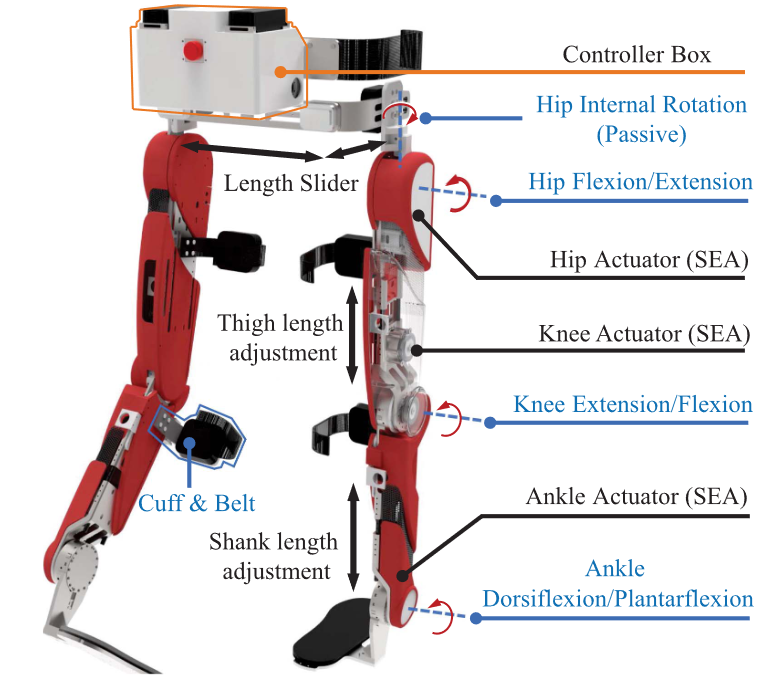
为此,科研团队设计了一种匹配人体关节自适应运动特性的刚柔耦合驱动关节,并构建了矢状面内髋-膝-踝关节柔顺驱动康复外骨骼系统。该系统是基于一种多模态刚度特性的弹性元件,从而实现人体关节短程刚度特性的仿生映射,在技术上取得了康复外骨骼关键零部件的突破。团队进一步构建了柔顺交互的驱动-关节-构型多维度人机适配的轻量化系统性方案,从而实现柔顺交互的驱动-关节-构型多维度人机适配。
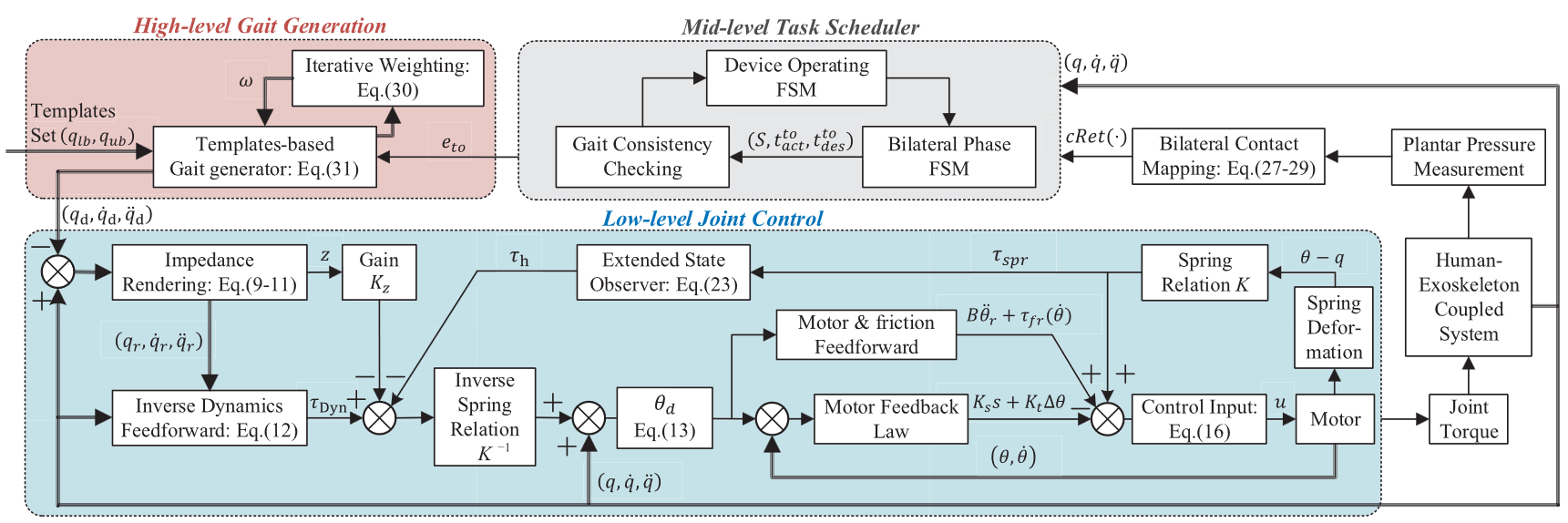
针对偏瘫患者双侧差异化运动机能与康复需求,团队提出了一种“规划-协同-控制”的多层次融合交互控制框架,突破了传统控制方法在“完全引导”与“完全顺应”之间的局限。通过结合多模板步态与实时状态反馈,该方法实现了耦合辅助下的生物力学特性重建与自适应规划,并在关节级控制方面引入了阻抗渲染控制方法,实现刚柔耦合双系统闭环稳定下的宽阻抗范围交互控制。
该研究以Hip–Knee–Ankle Rehabilitation Exoskeleton with Compliant Actuators: From Human–Robot Interaction Control to Clinical Evaluation 为题发表于国际机器人领域期刊IEEE Transactions on Robotics。沈阳自动化所博士生陈万鑫为该论文第一作者,张弼副研究员、赵新刚研究员为本文通讯作者。
团队长期与辽宁省人民医院开展临床合作,验证了研究方法对运动学重塑、步态模式自然性与双侧运动对称性等关键康复目标的有效改善,具备临床应用转化价值。
团队在外骨骼机器人与智能人机交互等研究领域深耕多年,陆续研制出面向老年人、患者人群的多类康复机器人系统平台,研究成果先后发表于IEEE T-RO,IEEE T-NSRE,The Innovation等国际期刊。以上研究工作得到国家自然科学基金、国家重点研发计划等项目的支持。(机器人学研究室)
附件下载: