


沈阳自动化所“旋翼飞行机械臂系统”研究取得新进展

特邀分论坛研讨会参会人员
“最佳学生论文”提名奖
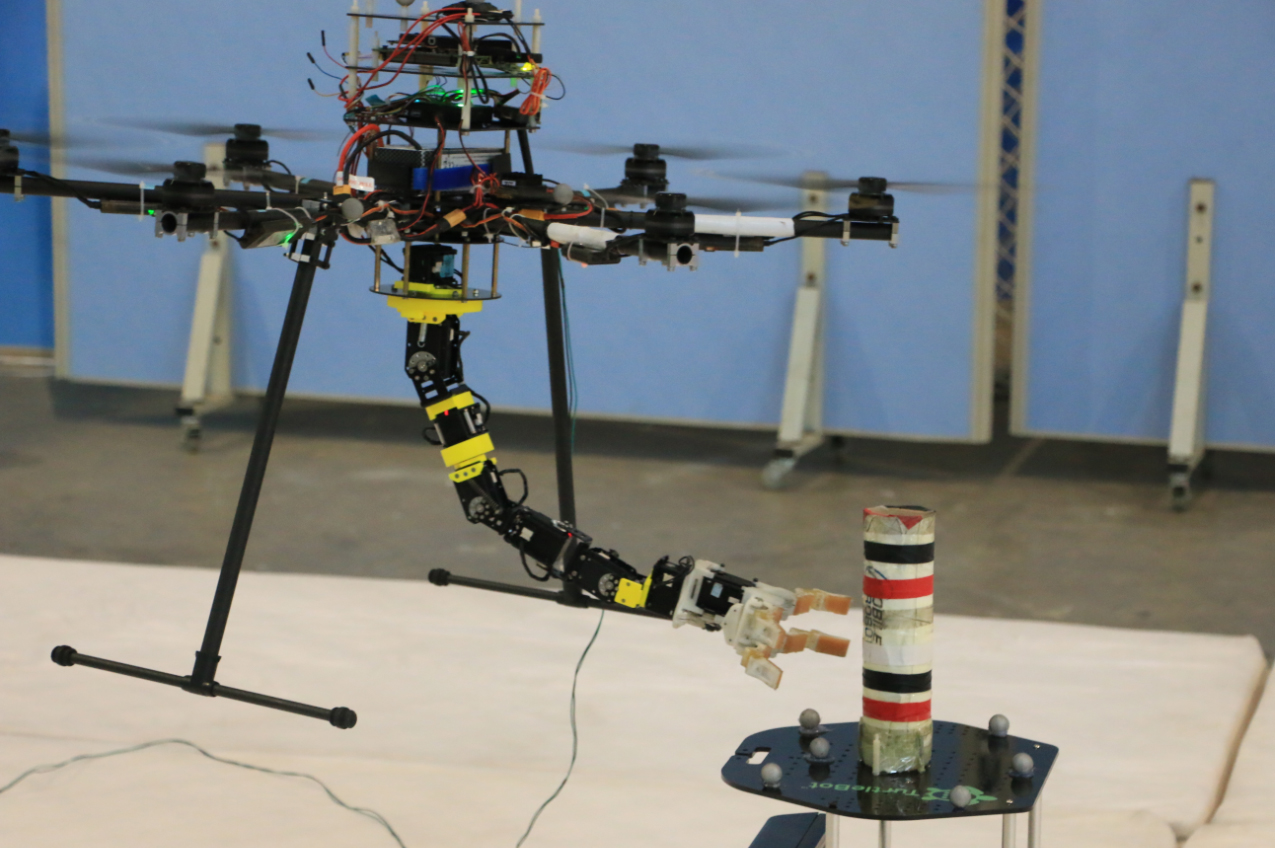
飞行机械臂抓取移动目标
2016 IEEE International Conference on Robotics and Biomimetics(以下简称IEEE ROBIO 2016)于12月3日至7日在青岛召开。会议期间,中国科学院沈阳自动化研究所以自然科学基金重点项目“面向任务的旋翼飞行机械臂自主作业与控制方法研究”为背景,组织召开了特邀分论坛研讨会。
此次分会邀请了来自韩国釜山大学、新西兰奥克兰大学、大连理工大学等国内外相关领域的专家,共同交流研究成果。旋翼飞行机械臂是在现有旋翼飞行机器人上安装多自由度操作手臂构成的一种新型机器人系统,与会专家针对旋翼飞行机械臂的相关研究进行了深入的学术讨论。沈阳自动化所自主机器人课题组博士研究生孟祥冬、张广玉展示了研究所在该方向上的最新研究进展,即实现了旋翼飞行机械臂对运动目标物的精准捕获。其中,孟祥冬等撰写的论文Design and Implementation of Rotor Aerial Manipulator System获得ROBIO 2016会议“最佳学生论文”提名奖(Finalist of Best Student Paper Award)。
此次研讨会充分展示了沈阳自动化所在新概念飞行机器人领域取得的最新研究成果,获得了国内外飞行机器人研究领域专家的认可,进一步提升了自主机器人课题组在该领域的影响力,课题组将继续在飞行机器人、智能地面移动平台、无人船等自主机器人方面展开深入研究,以取得更好成绩。(机器人学研究室)
附件下载:




