


沈阳自动化所“北极ARV”圆满完成我国第六次北极科考任务
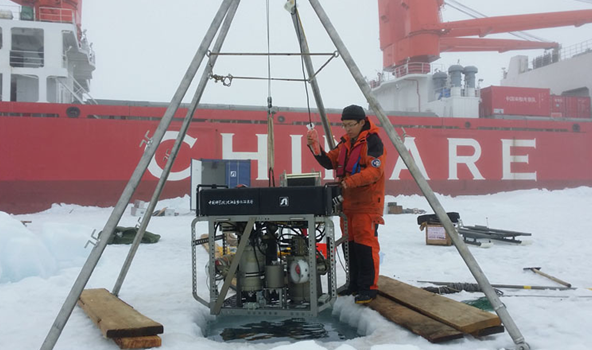
北极ARV作业现场
冰下视频截图
8月25日上午,由中国科学院沈阳自动化研究所研制的“北极ARV”水下机器人被缓缓吊入雪龙船舱内,这标志着该型水下机器人在长期冰站的作业任务圆满结束。在北纬81度建立的长期冰站上,“北极ARV”在有效的5天作业时间里,累计冰下工作时间近10小时,累积航行8公里,先后三次自主完成了长期冰站指定海冰区(100米×100米)的冰下光透射辐照度、海冰厚度、冰底形态、海洋环境等参数测量工作,还执行了“雪龙”船底海冰分布、尾部甲板重力柱下放、布放冰浮标在水下形态等勘查任务。 在海冰水下光辐照度和海冰厚度观测作业中,“北极ARV”从开凿的冰洞上释放入水,采用自主观测模式,对多融池海冰区域进行了精细水平观测作业,在选取的几个位置点上做了垂向运动,大幅度提高了冰下观测的精度与自动化程度。利用基于精确位置信息的科学数据,科学家可对北极夏季太阳短波辐射能在北极冰洋系统中的分配规律进行深入分析研究。 在科考作业间隙,沈阳自动化所的曾俊宝操控“北极ARV”对“雪龙”船底的海冰分布进行了详细拍摄,首次获得了“雪龙”号完整的冰下视频资料,可为我国将来建造新型破冰船提供第一手资料。此外,经过坐标变换,“北极ARV”采用自主作业模式找到已布放的冰浮标,并采用遥控模式对冰浮标底部形态进行观测,为冰浮标今后的布置提供科学依据。 通过此次试验性应用,进一步验证了“北极ARV”的现场作业、运动特性、自主/遥控混合控制和高纬度下的导航精度等多种能力。此次北极现场试验应用表明,“北极ARV”已成为北极科考中一种有效、连续、自主、实时的观测手段,可实现对冰下海冰物理特征、水文和光学特性等的同步精确观测,有望在今后的北极科考中发挥更大的作用。(海洋技术装备研究室)
附件下载:




